La NASA presenta un enjambre de robots cazadores de alienígenas
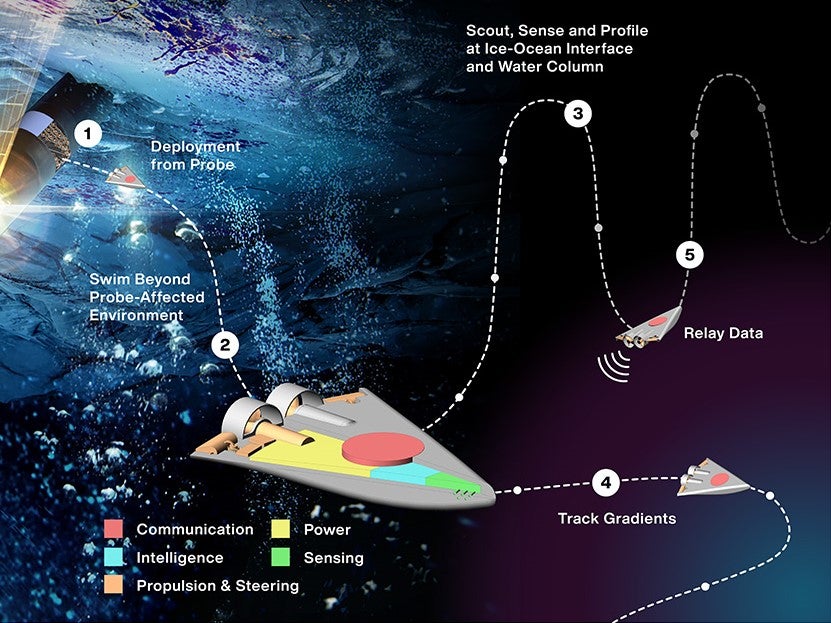
Cada uno de los robots SWIM está equipado con su propio sistema de propulsión y una computadora integrada
La NASA reveló un plan para lanzar enjambres de robots del tamaño de un celular a la búsqueda de vida extraterrestre en otros planetas.
La agencia espacial de EE.UU. ha desarrollado el concepto SWIM para la exploración de planetas y cuerpos celestes inhóspitos, como la luna Europa de Júpiter o la luna Encélado de Saturno.
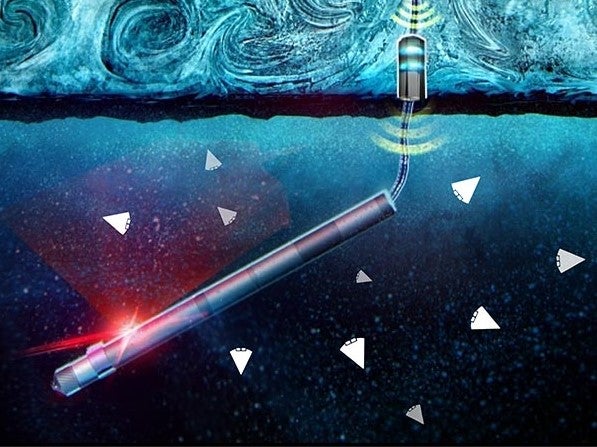
Los robots estarían integrados en una sonda que derrite el hielo y se hunde a través de la cáscara helada de varios kilómetros de espesor de los planetas, antes de que un mecanismo los libere bajo el agua para tomar mediciones de los océanos, antes imposibles de alcanzar.
El programa de Conceptos Avanzados Innovadores de la NASA concedió una subvención de US$600.000 a Ethan Schaler, ingeniero mecánico especializado en robótica del Laboratorio de Propulsión a Chorro de la agencia, para estudiar la viabilidad y las opciones de diseño, con la esperanza de construir un prototipo impreso en 3D en los próximos dos años.
“¿Dónde podemos llevar la robótica minituarizada y aplicarla de formas nuevas e interesantes para explorar nuestro sistema solar?” preguntó Schaler.



“Con un enjambre de pequeños robots nadadores, podemos explorar un volumen mucho mayor de agua oceánica y mejorar nuestras mediciones al tener varios robots recogiendo datos en la misma zona”.
La NASA dijo que el innovador diseño aumentaría la probabilidad de detectar pruebas de vida, al tiempo que evaluaría la posible habitabilidad de planetas lejanos.
Cada robot estaría equipado con su propio sistema de propulsión, computadora a bordo y sistema de comunicaciones por ultrasonido. Un conjunto de sensores también les permitiría medir la temperatura, la salinidad, la acidez, la presión y los biomarcadores.
El concepto SWIM aún no forma parte de ninguna misión de la NASA, pero los robots podrían formar parte de la carga útil de la misión Europa Clipper en 2024. Esta misión llegará a la luna joviana en 2030, donde comenzará a recoger información científica detallada.
“¿Qué pasaría si, después de todos esos años que se tardó en llegar a un océano, se atraviesa la capa de hielo en el lugar equivocado?”, comentó Samuel Howell, científico del equipo SWIM de la NASA.
“¿Qué pasa si hay señales de vida allí, pero no donde entraste en el océano? Llevando estos enjambres de robots con nosotros, seríamos capaces de mirar ‘por ahí’ para explorar mucho más de nuestro entorno de lo que permitiría un solo criobot”.
Bookmark popover
Removed from bookmarks